Arduino Nano Pinout
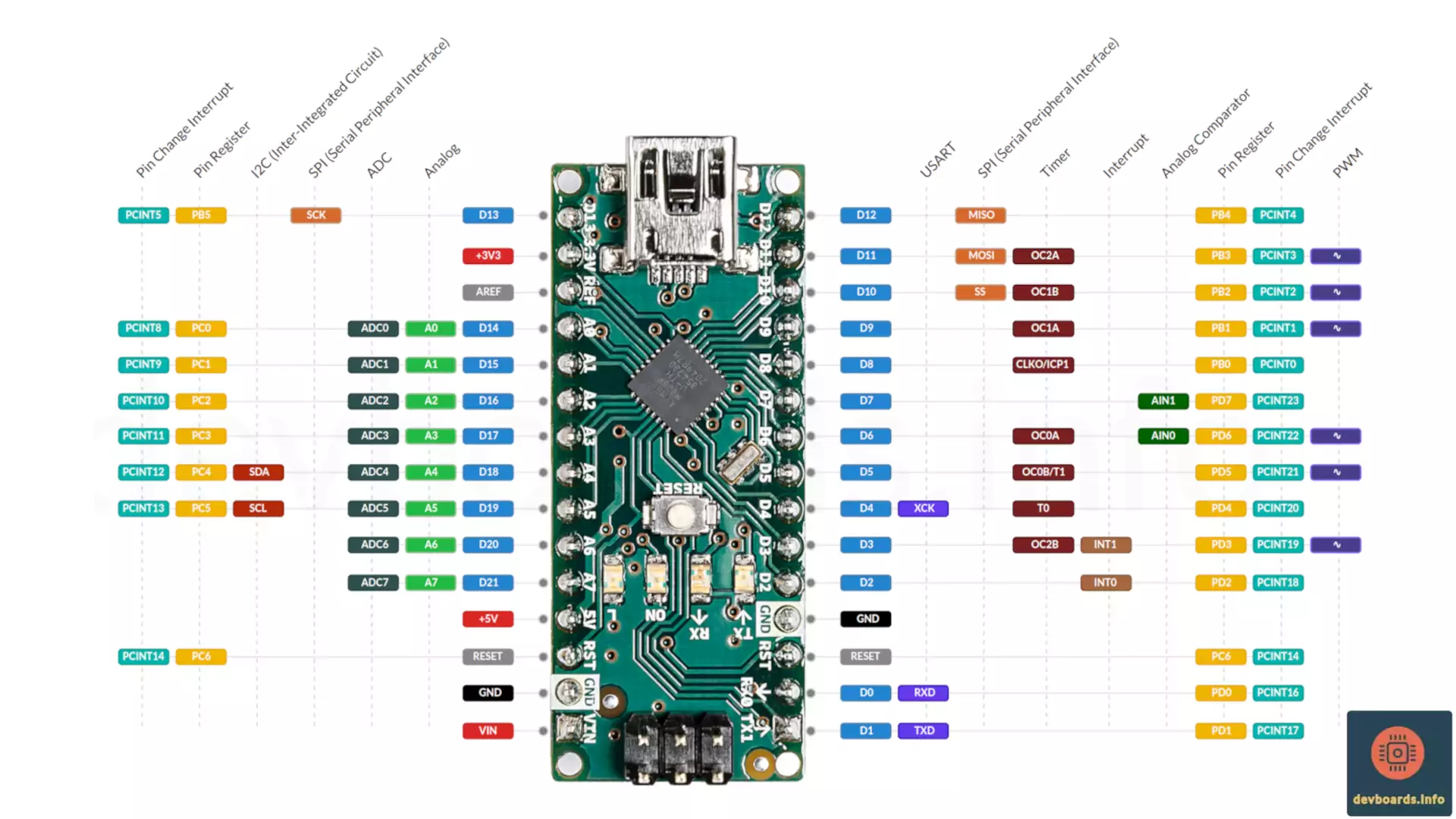
The Arduino Nano is a compact and powerful development board designed for hobbyists, students, and professionals alike. Based on the ATmega328 microcontroller, this board is a smaller and more affordable version of the popular BoardLink board. Despite its smaller size, the Arduino Nano packs a punch with its powerful features and wide range of capabilities featuring:
- Wide range of input and output pins, including 14 digital I/O pins of which 6 are PWMs
- 8 analog inputs
- 32 KB of Flash, 2 KB of SRAM and 1 KB of EEPROM
- 16 MHz quartz crystal
- USB Mini B connection for programming and power
- ICSP header for programming with an external programmer
- Support for all known communication protocols like UART, SPI and I2C
- Reset button
The Arduino Nano is a great choice for projects that require a small, portable, and low-cost microcontroller board. It is well-suited for projects such as controlling motors, reading sensors, or controlling LEDs.
Related Development Boards
Like the Arduino Nano pinout?
We publish new board pinouts every week, with interactive diagrams, specs compared, and quick-start tips. No filler, unsubscribe anytime.
Join makers and engineers who follow devboards.info